Часы. От гномона до атомных часов. Механизм анкерный
Анкерный механизм - это... Что такое Анкерный механизм?
состоит из анкерного колеса, вилки и баланса (двойного маятника), - зто часть часового механизма, преобразующая энергию главной (заводной) пружины в импульсы, передаваемые балансу для поддержания строго определенного периода колебаний, что необходимо для равномерного вращения шестереночного механизма.
Словарь часов . 2014.
- Аналоговый дисплей
- Анкер
Смотреть что такое "Анкерный механизм" в других словарях:
анкерный — ая, ое. ancre m. 1. Отн. к анкеру (часов, механизма). Только четыре с полтиной дали <в ломбарде за часы> ... Дамские, говорят, и цилиндр, кабы анкерные. С. Елпатьевский Служащий. // РБ 1902 1 1 21. При английском исполнении часы анкерного… … Исторический словарь галлицизмов русского языка
АНКЕРНЫЙ — (от франц. ancre якорь). Особый ход карманных часов. Словарь иностранных слов, вошедших в состав русского языка. Чудинов А.Н., 1910. АНКЕРНЫЙ особо устроенный механизм карманных часов. Полный словарь иностранных слов, вошедших в употребление в… … Словарь иностранных слов русского языка
Спусковой механизм часов — Простейший спусковой механизм часов. Гиря или пружина вращает шестерню, и она с помощью механизма спуска толкает маятник то в одну, то в другую сторону. Спусковой механизм часов (на языке часовщиков: спуск, ход) (фр. échappement, англ. escapement … Википедия
Турбийон — механизм, компенсирующий влияние гравитации Земли на точность хода часов. Представляет собой анкерный механизм, помещенный внутрь мобильной платформы с балансом в центре, и совершающий полный оборот вокруг собственной оси за одну минуту.… … Словарь часов
Часы (прибор) — Часы, прибор для измерения текущего времени (в секундах, минутах, часах). Ч. относятся к категории «приборов времени», куда входят также хронометр, секундомер, таймер, реле времени и комбинированные приборы, например Ч. с секундомером. Для… … Большая советская энциклопедия
Часы — I Часы прибор для измерения текущего времени (в секундах, минутах, часах). Ч. относятся к категории «приборов времени», куда входят также Хронометр, Секундомер, Таймер, Реле времени и комбинированные приборы, например Ч. с секундомером.… … Большая советская энциклопедия
Устройство плёночного фотоаппарата — Основная статья: Плёночный фотоаппарат Содержание 1 Общие элементы конструкции 2 Внешние части и органы управления … Википедия
Устройство аналогового фотоаппарата — Основная статья: Плёночный фотоаппарат Содержание 1 Общие элементы конструкции 2 Внешние части и органы управления … Википедия
Фотографический затвор — Шторный затвор Затвор фотографический устройство, используемое для перекрытия светового потока, проецируемого объективом на фотоматериал (например, фотоплёнку) или фотоматрицу (в циф … Википедия
Затвор (фото) — Затвор фотографический устройство, используемое для перекрытия светового потока, проецируемого объективом на фотоматериал (например, фотоплёнку) или фотоматрицу (в цифровой фотографии). Путем открытия затвора на определенное время выдержки… … Википедия
анкерный механизм
анкерный механизмescapement
Русско-английский словарь по строительству и новым строительным технологиям. - «Русский язык-Медиа». В.В. Быков, А.А. Поздняков . 2003.
- анкерный конус
- анкерный пролет
Look at other dictionaries:
Анкерный механизм — состоит из анкерного колеса, вилки и баланса (двойного маятника), зто часть часового механизма, преобразующая энергию главной (заводной) пружины в импульсы, передаваемые балансу для поддержания строго определенного периода колебаний, что… … Словарь часов
анкерный — ая, ое. ancre m. 1. Отн. к анкеру (часов, механизма). Только четыре с полтиной дали <в ломбарде за часы> ... Дамские, говорят, и цилиндр, кабы анкерные. С. Елпатьевский Служащий. // РБ 1902 1 1 21. При английском исполнении часы анкерного… … Исторический словарь галлицизмов русского языка
АНКЕРНЫЙ — (от франц. ancre якорь). Особый ход карманных часов. Словарь иностранных слов, вошедших в состав русского языка. Чудинов А.Н., 1910. АНКЕРНЫЙ особо устроенный механизм карманных часов. Полный словарь иностранных слов, вошедших в употребление в… … Словарь иностранных слов русского языка
Спусковой механизм часов — Простейший спусковой механизм часов. Гиря или пружина вращает шестерню, и она с помощью механизма спуска толкает маятник то в одну, то в другую сторону. Спусковой механизм часов (на языке часовщиков: спуск, ход) (фр. échappement, англ. escapement … Википедия
Турбийон — механизм, компенсирующий влияние гравитации Земли на точность хода часов. Представляет собой анкерный механизм, помещенный внутрь мобильной платформы с балансом в центре, и совершающий полный оборот вокруг собственной оси за одну минуту.… … Словарь часов
Часы (прибор) — Часы, прибор для измерения текущего времени (в секундах, минутах, часах). Ч. относятся к категории «приборов времени», куда входят также хронометр, секундомер, таймер, реле времени и комбинированные приборы, например Ч. с секундомером. Для… … Большая советская энциклопедия
Часы — I Часы прибор для измерения текущего времени (в секундах, минутах, часах). Ч. относятся к категории «приборов времени», куда входят также Хронометр, Секундомер, Таймер, Реле времени и комбинированные приборы, например Ч. с секундомером.… … Большая советская энциклопедия
Устройство плёночного фотоаппарата — Основная статья: Плёночный фотоаппарат Содержание 1 Общие элементы конструкции 2 Внешние части и органы управления … Википедия
Устройство аналогового фотоаппарата — Основная статья: Плёночный фотоаппарат Содержание 1 Общие элементы конструкции 2 Внешние части и органы управления … Википедия
Фотографический затвор — Шторный затвор Затвор фотографический устройство, используемое для перекрытия светового потока, проецируемого объективом на фотоматериал (например, фотоплёнку) или фотоматрицу (в циф … Википедия
Затвор (фото) — Затвор фотографический устройство, используемое для перекрытия светового потока, проецируемого объективом на фотоматериал (например, фотоплёнку) или фотоматрицу (в цифровой фотографии). Путем открытия затвора на определенное время выдержки… … Википедия
Реферат Анкер (часы)
скачатьРеферат на тему:
План:
- Введение
- 1 История
- 1.1 Жидкостный спусковой механизм
- 1.2 Механический спусковой механизм
- 2 Надежность
- 3 Точность
- 4 Механические спусковые механизмы
- 4.1 Штыревой спусковой механизм
- 4.2 Анкерный спусковой механизм
- 4.3 Беcтиковый спусковой механизм
- 4.4 Рычажный спусковой механизм
- 4.5 Дуплексный (двухсторонний) спусковой механизм
- 4.6 Кузнечиковый спусковой механизм
- 4.7 Гравитационный спусковой механизм
- 5 Электромеханические спусковые механизмы
- 5.1 Часы Хиппа
- 5.2 Часы со свободным маятником
Примечания
Введение
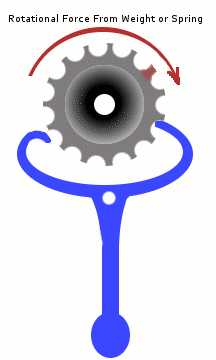
Простейший спусковой механизм часов. Гиря или пружина вращает шестерню, и она с помощью механизма спуска толкает маятник то в одну, то в другую сторону.
Спусковой механизм часов (на языке часовщиков: спуск, ход) (фр. échappement, англ. escapement, нем. hemmung) — в механических часах: устройство, которое преобразует непрерывное вращательное движение в колебательное или возвратно-поступательное движение. Это устройство обеспечивает равномерное расходование энергии, запасённой в пружине или гире.
Спусковой механизм двигает колебательный элемент часов, обычно это маятник или балансирное колесо. Сам он получает энергию от зубчатой шестерни, которая вращается спиральной пружиной или гирей. Без спускового механизма система просто неуправляемо раскрутится, спусковой же механизм регулирует это движение, управляя периодическими колебаниями маятника или балансирного колеса. Это позволяет шестерне совершать равномерные вращательные движения с каждым колебанием маятника, двигая механизм отсчёта времени часов с постоянной скоростью. Вторая функция спускового механизма заключается в том, чтобы поддерживать колебания маятника или балансирного колеса, передавая им небольшие толчки.
Каждое колебание маятника освобождает спусковой механизм, переводя его из состояния "блокирован" в состояние "движение" в течение короткого периода, который заканчивается, как только следующий зуб шестерни упирается в блокирующую поверхность спускового механизма. Именно это периодическое освобождения энергии и быстрой остановки заставляет часы «тикать». Этот звук издаёт зубчатая передача, когда шестерня вдруг останавливается в момент очередного блокирования спускового механизма.
1. История
Важность спускового механизма в истории техники заключается в том, что он является ключевым изобретением, давшим возможность создать все типы механических часов.[1] Благодаря этому изобретению в Европе в XIII веке произошёл поворот в разработке часовых механизмов от применения непрерывных процессов (таких, как, например, поток воды в водяных часах) к периодически повторяющимся процессам, таким как колебания маятника, которые могли обеспечить более высокую точность.
1.1. Жидкостный спусковой механизм
Первые жидкостные спусковые механизмы сделал в Китае буддийский монах И Син, который вместе с государственным деятелем Лян Линцзанем применил их в 723 г. (или 725 г.) в армиллярной сфере и часах.[2] В эпоху империи Сун (960-1279 гг.) инженеры Чжан Сисунь (ум. в конце X века) и Су Сун (1020 — 1101 гг.) усовершенствовали спусковые механизмы в своих астрономическими башенных часах, прежде чем технология в Китае пришла в застой и упадок. По словам Ахмада аль Хассана, ртутный спусковой механизм в Испании, сделанный для короля Кастилии Альфонса X в 1277, можно отнести к самым ранним, описанным в арабских источниках.[3] Сведения об этих ртутных спусковых механизмах, возможно, распространились по Европе после переводов арабского и испанского текстов.
Однако, ни один из таких спусковых механизмов не обладал достаточной точностью, поскольку их работа по измерению времени зависела от равномерности потока жидкости через отверстие. Например, в часах Су Сонга вода перетекала в ёмкость, установленную на штыре. Роль спускового механизма заключалась в том, чтобы наклонить чашу ёмкости каждый раз, когда она наполнится, при этом колесо часового механизма повернётся на определённый угол, вода из чаши выльется, и затем процесс повторяется снова.
1.2. Механический спусковой механизм
Первые механические спусковые механизмы — штыревые, в течение нескольких веков использовались в устройствах управления колокольным звоном, прежде чем их стали применять в часах.[4] В XIV веке такие механизмы устанавливали в первых механических часах в Европе, это были большие башенные часы. Сейчас уже трудно установить, когда они впервые были использованы, потому что сложно отличить, какие из башенных часов этого периода были механические, а какие — водяные. Однако, косвенные свидетельства, такие, как резкое увеличение стоимости строительства часов, указывают на конец XIII века как на наиболее вероятную дату появления современных спусковых механизмов. Астроном Роберт Англикус писал в 1271, что часовые мастера пытаются изобрести спусковой механизм, но это пока не удалось. Тем не менее, большинство источников согласны с тем, что механические часы со спусковым механизмом в 1300 г. уже существовали.
2. Надежность
Надежность спускового механизма зависит от квалификации изготовителя и уровня обслуживания. Плохо сделанные или плохо обслуживаемые устройства будут иметь проблемы. Спусковой механизм должен точно переводить колебания маятника или балансирного колеса во вращение шестерен часового механизма, и он должен передавать достаточно энергии маятнику или балансирному колесу для поддержания его колебаний.
Во многих спусковых механизмах разблокирование создаёт скользящее движение. Например, в показанной выше анимации, лопатки анкера скользят по зубу спусковой шестерни при колебаниях маятника. Лопатки часто делают из очень твёрдых материалов, таких, как например, искусственный рубин, но даже в этом случае они требуют смазки. Поскольку смазочное масло со временем улетучивается из-за испарения, окисления и т.д., то периодически требуется повторная смазка. Если этого не делать, то часы могут работать нестабильно или вообще остановиться, а детали спускового механизма подвергнутся быстрому износу. Повышенная надежность современных часов в основном объясняется более высоким качеством смазки. В высококачественных часах смазки хватает на пять лет и более.
В некоторых спусковых механизмах вообще удалось избежать трения скольжения, например, в кузнечиковом механизме Джона Харрисона XVIII века, или в коаксиальном механизме Джорджа Дэниэлса XX века. В них нет необходимости смазывать спусковой механизм (но это не отменяет требования по смазке других частей передаточного механизма).
3. Точность
Точность механических часов зависит от точности таймерного устройства. Если это маятник, то точность определяет период колебаний маятника. Если стержень маятника изготовлен из металла, он будет расширяться от контакта с теплом, при этом период колебаний будет меняться. В дорогих часах для изготовления маятника используются специальные сплавы, чтобы минимизировать эти отклонения. Период колебаний маятника варьируется также в зависимости от размаха колебаний. В высокоточных часах дугу колебаний делают как можно меньше. Маятниковые часы могут достичь очень высокой точности. Даже в XX веке маятниковые часы использовались в лабораторных измерениях. Спусковой механизм оказывает большое влияние на точность. Чем точнее маятник получает импульс энергии, тем точнее период его колебаний. В идеале импульс должен быть равномерно распределён по обе стороны от нижней точки колебаний маятника. Это объясняется тем, что подталкивание маятника при его движении к нижней точке колебания даёт прирост его энергии, а подталкивание при отходе от этой точки приводит к потере энергии. Если импульс равномерно распределён, то он отдаёт энергию маятнику без влияния на период его колебаний.
Наручные и другие маленькие часы не используют маятник в качестве таймера. Вместо него они используют балансирную пружину — тонкий металлический волосок, соединённый с балансирным колесом. Балансирное колесо вращается взад-вперёд, в хороших швейцарских часах — с частотой 4 Гц (или 8 тиков в секунду). В некоторых часах используются более высокая скорость. Длина волоска не должна зависеть от температуры, для его изготовления используются специальные сложные сплавы. Как и в случае с маятником, спусковой механизм должен делать небольшой толчок в каждом цикле, чтобы поддерживать колебания балансира. Актуальна та же проблема смазки. Если спусковой механизм вовремя не смазать, часы начнут терять точность (как правило, происходит ускорение).
Карманные часы являются предшественниками современных наручных часов. Их носили в кармане, поэтому они, как правило, были в вертикальной ориентации. Гравитация вызывает некоторую потерю точности, поскольку с течением времени происходит отклонение от симметрии в механизме. Чтобы свести к минимуму это влияние, французский часовщик Бреге изобрёл в 1795 году особый тип спускового механизма — «турбийон». В нём балансир помещается в специальную вращающуюся рамку (период вращения, как правило, один оборот в минуту), что и позволяет сглаживать гравитационные искажения.
Самые точные механические часы изготовил английский археолог Эдвард Холл.[5] По его данным точность хода часов составила около 0,02 секунд за 100 дней. Эти часы электромеханические, в них в качестве таймера используется маятник, а энергия ему передаётся с помощью специальных реле и электромагнитов.
4. Механические спусковые механизмы
Начиная с 1658, когда появились маятник и пружинный балансир, было разработано более 300 видов различных механических спусковых механизмов, но только около 10 из них получили широкое распространение. Почти все они описаны ниже. В XX веке электронные методы измерения времени постепенно вытеснили механические часы, так что изучение конструкции спусковых механизмов стало небольшим курьёзом.
4.1. Штыревой спусковой механизм
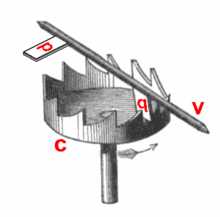
На штыревом спусковом механизме показаны: (c) — колесо с коронкой, (v) — штырь, (p, q) — лопатки.
Самый первый спусковой механизм, появившийся в Европе примерно в 1275 г., был штыревой, который называли также корончато-штыревым механизмом. Он появился ещё до маятника и первоначально управлялся фолиотом, горизонтальной планкой с грузом на каждом конце. Вертикальный стержень (штырь), крепится к средней части фолиота и имеет две небольшие пластинки (лопатки), торчащие подобно флаг на древке. Одна лопатка крепится сверху, а другая снизу штыря, и они повёрнуты на чуть более девяноста градусов друг относительно друга. Спусковая шестерня делается в виде короны и вращается относительно вертикальной оси. Когда шестерня начинает вращаться, её зуб толкает верхнюю лопатку, и фолиот начинает двигаться. Когда зуб выталкивает верхнюю лопатку, нижняя поворачивается и входит в зацепление. Импульс движения фолиота толкает шестерню назад, и в конечном счете система останавливается. В этот момент нижняя лопатка подталкивает фолиот, и процесс повторяется. Эта система не имеет собственной частоты колебаний, просто некая сила всё время подталкивает шестерню и она по инерции поворачивается вокруг своей оси.
На следующем этапе развития та же идея была воплощена в сочетании с маятником. Ось штыря стала горизонтальной, половина фолиота исчезла, а зубчатое колесо поворачивается вокруг вертикальной оси. Такой же спусковой механизм, но гораздо меньшего размера, использовался в часах с балансиром и пружинкой вместо маятника. Первый морской хронометр Джона Гаррисона использовал сильно изменённый штыревой механизм, который, как оказалось, может быть хорошим таймером.
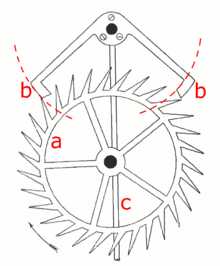
4.2. Анкерный спусковой механизм
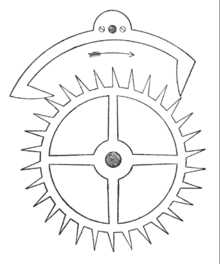
Анкерный спусковой механизм.
Изобретённый около 1660 года Робертом Гуком, анкер быстро заменил штырь и стал стандартом для использования в маятниковых часах вплоть до конца XIX века. Его преимущество состоит в том, что он сократил амплитуду колебаний маятника до 3° — 6 °, в результате чего маятник стал изохронным. Он позволил использовать более длинные, медленнее движущиеся маятники, которые требуют меньше энергии. Благодаря ему появились длинные узкие напольные и настенные маятниковые часы (в некоторых странах их называют «дедовскими»), которые можно встретить ещё и в наше время.
Анкерный механизм состоит из спусковой шестерни с обратным наклоном зубьев и якореобразного 'анкера', поворачивающегося над нею из стороны в сторону и соединённого с маятником. Анкер имеет на концах изогнутые лопатки, которые поочерёдно входят в зубья шестерни, получая импульсы. Механически его работа имеет сходство со штыревым механизмом, и он перенял от штыревого механизма два недостатка: (1) маятник постоянно подталкивается зубьями шестерни в каждом цикле, он не может совершать свободные колебания, тем самым нарушается его изохронность; (2) этот спусковой механизм имеет отдачи, анкер в своём цикле толкает шестерню в обратную сторону. Это вызывает мёртвый ход, повышающий износ часового механизма, и снижает точность. Эти недостатки были устранены в беcтиковом спусковом механизме, который постепенно заменил анкерный в точных часах.
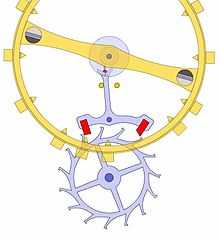
4.3. Беcтиковый спусковой механизм
Беcтиковый спусковой механизм.[6] Показано: (a) — спусковая шестерня (b) — лопатки, показаны концентрические блокирующие поверхности (c) — стойка маятника.
Беcтиковый спусковой механизм является улучшением анкерного. Впервые его сделал Томас Томпион по проекту Ричарда Таунлея в 1675 году,[7] хотя часто ссылаются на преемника Томпиона, Джорджа Грэма, который популяризовал его в 1715 г.[8] В анкерном спусковом механизме колебания маятника в части своего цикла толкают спусковую шестерню в обратную сторону. Этот «откат» мешает движению маятника, в результате снижается точность, а реверсы движения шестерни вызывают эффект «мёртвого хода» и создают высокие нагрузки на систему, что приводит к повышенному трению и износу. Основное преимущество бестикового механизма в том, что в нём эти отдачи устранены.
В бестиковом механизме лопатки имеют вторую криволинейную «блокирующую» поверхность, концентрическую относительно оси вращения анкера. При экстремумах колебаний маятника зуб спускового колеса становится неподвижным на этой поверхности, не передавая маятнику импульса, который вызывает откат. Вблизи нижнего положения маятника зуб выходит из зацепления с блокирующей поверхностью и входит в зацепление с остроугольной «импульсной» поверхностью, давая толчок маятнику до того, как лопатка освободит зуб. Это был первый механизм с раздельными блокирующей и импульсной поверхностями. Бестиковый механизм впервые был использован в часах с точной регулировкой хода. Ввиду более высокой точности он заменил анкерный механизм. Бестиковый механизм используется практически во всех современных маятниковых часах.
4.4. Рычажный спусковой механизм
Рычажный спусковой механизм использовался в подавляющем большинстве часов после 1800 г. Он является точным и достаточно простым в изготовлении. Он также является самозапускающимся, поэтому если часы встряхнуть, так чтобы балансир остановился, он автоматически начнёт работать снова. Есть несколько типов рычажных спусковых механизмов. Оригинальний тип был штативный, в котором рычаг и колесо балансира всегда соединялись с помощью шестерни. Позже стало ясно, что все зубья из шестерни можно удалить, за исключением одного. Так появился разъединённый рычажный спусковой механизм. Его не только легче и проще сделать, но он также значительно более точный. Рычаг может быть поставлен так, чтобы он был под прямым углом к спусковой шестерне, такой вариант предпочитают британские часовщики. Или же, рычаг может быть поставлен внутри балансира и внутри спусковой шестерни, такому варианту отдают предпочтение швейцарские и американские часовщики. Наконец, в «однодолларовых» часах используется весьма примитивный тип рычажного спускового механизма под названием «лопаточно-штыревой».
Внутренний или швейцарский рычажный спусковой механизм.
4.5. Дуплексный (двухсторонний) спусковой механизм
Дуплексный спусковой механизм был изобретен Робертом Гуком около 1700 г., улучшен, Жаном Батистом Дютертре и Пьером Ле Руа, и окончательно отработан Томасом Трайером, который запатентовал его в 1782 г.[9] Он использовался в качественных английских карманных часах с 1790 до 1860 гг., и в Уотербери, в дешёвых американских часах 'ширпотреба', в течение 1880—1898 гг. В дуплексном механизме, как и в хронометре, с которым он имеет сходство, балансир получает импульс только в одном из двух колебаний цикла. Спусковая шестерня имеет два комплекта зубьев (отсюда название 'дуплексный'). Длинный стопорный зуб сделан со стороны балансира, а короткий импульсный (подталкивающий) зуб выступает аксиально сверху. Цикл начинается, когда стопорный зуб находится напротив рубинового диска. Балансир начинает движение против часовой стрелки через центральное положение, бороздка рубинового диска освобождает зуб. Когда балансир начинает обратное движение, лопатка в крайнем правом положении получает толчок от импульсного зуба. В это время блокирующий зуб попадает на ролик рубинового диска и остается там, пока балансир не завершит цикл колебания по часовой стрелке, затем процесс повторяется. Во время движения по часовой стрелке импульсный зуб быстро опускается в бороздку рубинового диска и остаётся там.
Дуплексный механизм относится к механизмам с трением покоя, балансир никогда не бывает абсолютно свободен от спускового механизма. Как и в хронометре, небольшое трение скольжения имеется во время импульса, потому что импульсный зуб и лопатка движутся почти параллельно, поэтому необходима небольшая смазка. Дуплексный механизм обеспечивает точность по крайней мере не хуже рычажного и, возможно, приближается к хронометру. Однако чувствительность дуплексного механизма к встряхиваниям сделали его непригодным для активных людей. Как и хронометр, он не является самозапускающимся, в случае внезапной остановки во время движения балансира по часовой стрелке, он не может запуститься снова.
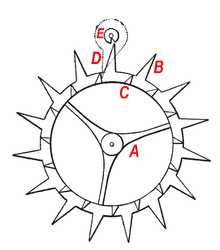
Дуплексный спусковой механизм, показано: (A) — спусковая шестерня, (B) — стопорный зуб, (C) — импульсный зуб, (D) — лопатка, (E) — рубиновый диск. Лопатка и диск крепятся к оси балансира, который на рисунке не показан.
4.6. Кузнечиковый спусковой механизм
Редким, но интересным спусковым механизмом является кузнечиковый механизм Джона Гаррисона. В нём маятник приводится в движение двумя шарнирными рычажками (лопатками). При колебаниях маятника один рычажок зацепляет шестерню и двигает её немного назад. Это освобождает другой рычажок, который движется назад, освобождая шестерню. Когда маятник движется в обратную сторону, второй рычажок зацепляет шестерню, толкает её и освобождает первый рычажок, и так далее. Кузнечиковый механизм гораздо сложнее в производстве, чем другие спусковые механизмы, поэтому он большая редкость. Кузнечиковый механизм, сделанный Гаррисоном в XVIII веке, всё ещё работает. Большинство механизмов изнашиваются гораздо быстрее и расходуют гораздо больше энергии.
4.7. Гравитационный спусковой механизм
Гравитационный спусковой механизм использует небольшой груз или маленькую пружинку для передачи импульса непосредственно на маятник. Первая конструкция состояла из двух плечей рычажка, который поворачивался очень близко к точке подвеса маятника, плечи располагались с разных сторон маятника. На каждом плече закреплена наклонённая лопатка. Когда маятник поднимает одно плечо достаточно высоко, его лопатка высвобождает спусковую шестерню. Почти сразу же другой зуб спусковой шестерни начинает скользить вверх по поверхности другого плеча, тем самым поднимая его. Он поднимает лопатку и останавливается. Тем временем первый зуб всё ещё находится в контакте с маятником и опускается ниже точки, с которой началось соприкосновение. Это снижение даёт импульс маятнику. Конструкция разрабатывалась постепенно с середины XVIII до середины XIX века. В конечном итоге этот механизм выбрали для башненных часов. В последнее время он усовершенствован и превратился в особый инерционно-гравитационный спусковой механизм, изобретённый Джеймсом Арнфельдом.
5. Электромеханические спусковые механизмы
В конце XIX века были разработаны электромеханические спусковые механизмы для маятниковых часов. В них реле или фотореле переключает электромагнит в такт с колебаниями маятника. Электромеханические спусковые механизмы являются одними из лучших. В некоторых часах электрические импульсы, которые приводят в движение маятник, управляют также перемещением плунжера, вращающего зубчатую шестерню.
5.1. Часы Хиппа
В середине 19-го века Маттиас Хипп изобрёл электромагнитный переключатель импульсов для часов. Маятник движет шестерню с храповиком через собачку, а эта шестерня движет остальной часовой механизм отсчёта времени. Маятник получает импульс не на каждом колебании и даже не на каждом втором колебании. Он получает импульс только тогда, когда амплитуда колебаний становится ниже определенного уровня. Как и собачка индикаторного механизма, маятник также снабжён небольшим флюгером; когда он поворачивается вверх, маятник совершает полностью свободные колебания. Когда амплитуда колебаний маятника достаточно большая, флюгер попадает в канавку, и маятник его не касается. Если амплитуда колебаний уменьшается, флюгер выходит из канавки, маятник его зацепляет и толкает вниз. Происходит замыкание цепи электромагнита, который посылает импульс маятнику. Амплитуда колебаний маятника увеличивается, и процесс повторяется.
5.2. Часы со свободным маятником
В XX веке Уильям Гамильтон Шорт изобрёл часы со свободным маятником, запатентовав их в сентябре 1921 года. Они производятся компанией Synchronome, их точность достигает сотой доли секунды в сутки. В этой системе «главный» маятник, стержень которого выполнен из специального стального сплава с 36% никеля (инвар) и длина которого почти не зависит от температуры, совершает свободные от внешнего влияния колебания, по возможности в закрытой вакуумной камере, и не совершает никакой работы. Он имеет механический контакт со спусковым механизмом через каждые 30 секунд и лишь на доли секунды. Вторичный «ведомый» маятник вращает храповик, который переключает электромагнит через каждые тридцать секунд. Этот электромагнит освобождает гравитационный спусковой механизм главного маятника. Доли секунды спустя движение главного маятника отключает спусковой механизм. Гравитационный спусковой механизм дает крошечный импульс главному маятнику, который поддерживает колебания маятника.
Примечания
- Cipolla Carlo M. Clocks and Culture, 1300 to 1700 - books.google.com/books?id=YSf9MVxa2JEC&pg=PA31&dq=verge escapement technology&sig=6ZbQh-an59yCcesR1mjn1p8w-h5. — W.W. Norton & Co.. — P. 31. — ISBN 0393324435
- Needham, Joseph (1986). Science and Civilization in China: Volume 4, Physics and Physical Technology, Part 2, Mechanical Engineering. Taipei: Caves Books Ltd. Page 165.
- Ahmad Y Hassan, Transfer Of Islamic Technology To The West, Part II: Transmission Of Islamic Engineering - www.history-science-technology.com/Articles/articles 71.htm, History of Science and Technology in Islam.
- Headrick, Michael (2002). «Origin and Evolution of the Anchor Clock Escapement - www.geocities.com/mvhw/anchor.html». Control Systems magazine, 22 (2).
- Hall, E. T. The Littlemore Clock - www.iinet.com/~holmstro/hsn_article.php. NAWCC Chapter 161 - Horological Science - www.iinet.com/~holmstro/hsn_entry.html. National Association of Watch and Clock Collectors (1996).
- Britten Frederick J. Watch and Clockmaker's Handbook, 9th Edition - books.google.com/books?id=5SYJAAAAIAAJ&pg=PA108. — E.F.& N. Spon. — P. 108.
- Smith, Alan (2000) The Towneley Clocks at Greenwich Observatory - www.mikeoates.org/mas/history/lectures/20001116.htm Проверено 2009-03-27
- Milham 1945, p.185
- Nelthropp Harry Leonard A Treatise on Watchwork, Past and Present - books.google.com/books?id=7DcDAAAAQAAJ&pg=PA159. — E. & F.N. Spon., p.159-164. British patent no. 1811
wreferat.baza-referat.ru
Механизм анкерный гибкий с подвижной рамой
Анкерный механизм (100) для часового механизма (900) или часов (1000), включающий по меньшей мере один баланс (300) и по меньшей мере одно анкерное колесо (400). Передача импульсов между балансом (300) и анкерным колесом (400) осуществляется при помощи гибкого механизма (500) из единой детали, включающего по меньшей мере один контактный шпиндель (600), взаимодействующий с указанным анкерным колесом (400) или соответственно с указанным балансом (300), при этом указанный состоящий из единой детали гибкий механизм (500) соединен по меньшей мере одной гибкой пластиной (700) с неподвижной структурой (800) указанных часов (1000), либо соответственно с указанным по меньшей мере одним анкерным колесом (400). 3 н. и 8 з.п. ф-лы, 12 ил.
Область техники
Изобретение относится к анкерному механизму часового механизма или часам, включающим по меньшей мере один баланс и по меньшей мере одно анкерное колесо, в которых передача импульсов передача импульсов между указанным по меньшей мере одним балансом и указанным по меньшей мере одним анкерным колесом осуществляется при помощи гибкого механизма из единой детали, содержащегося в указанном анкерном механизме и включающего по меньшей мере один контактный шпиндель, взаимодействующий с указанным по меньшей мере одним анкерным колесом или соответственно с указанным по меньшей мере одним балансом, и в которых указанный состоящий из единой детали гибкий механизм является блокирующим рычагом, который включает по меньшей мере одну подвижную раму с фиксирующими зубцами для взаимодействия с зубьями указанного анкерного колеса, множество указанных гибких пластин, которые являются предварительно нагруженными изогнутыми гибкими пластинами, и вилку с выступами для взаимодействия с импульсным камнем указанного баланса, и в которых указанная подвижная рама полностью окружает указанное анкерное колесо.
Изобретение также относится к часовому механизму, включающему неподвижную структуру и по меньшей мере один механизм данного типа.
Изобретение также относится к часам, включающим неподвижную структуру и по меньшей мере один механизм данного типа и/или по меньшей мере один часовой механизм данного типа.
Изобретение относится к области часовых механизмов, а более конкретно - к области анкерных механизмов.
Уровень техники
Для обеспечения производительности при изготовлении часов требуются высокоточные механизмы с минимальными требованиями к габаритам и малым числом компонентов для контроля затрат на изготовление, сборку и регулировку. Технологии LIGA и DRIE обеспечивают изготовление гибких точных компонентов и являются перспективной альтернативой для стандартных схем, которые отличаются большим числом компонентов и сложностью регулировок.
Международный патент WO No 2011/120180 А1 фирмы Rolex SA, описывает паллетный двуплечий блокирующий рычаг, каждое плечо которого снабжено камнем паллеты для зацепления с одним и тем же зубчатым колесом, при этом два эластичных плеча соединяют тормозной рычаг с рамой, которая позволяет ему поворачиваться, а третий эластичный элемент по существу формирует систему с двумя положениями равновесия.
В патенте УЗ №2037335 А2 фирмы Enzler & Von Gunten описывается состоящий из единой детали швейцарский рычаг с двумя плечами, каждое из которых снабжено камнем паллеты, и включающий плечи, сформированные гибкими пластинами, объединенными в структуру и определяющими виртуальную ось.
В патенте ЕР №2450755 А1 фирмы Nivarox описывается анкерное колесо часового механизма, включающее множество зубчатых колес, которые являются соосными, вращаются синхронно относительно шарнирной оси и включают по меньшей мере одно первое импульсное колесо в одной первой импульсной плоскости и по меньшей мере одно второе зубчатое спусковое колесо в одной второй упорной плоскости, параллельной или совпадающей с первой импульсной плоскостью. Второе спусковое зубчатое колесо включает по меньшей мере один подвижный узел, который включает, с одной стороны, по меньшей мере один спусковой зуб, который может перемещаться в радиальном направлении относительно шарнирной оси и возвращается в положение равновесия первый возвращающим средством, и, с другой стороны, по меньшей мере один фиксирующий зуб, возвращаемый в первом радиальном направлении в сторону фиксированного положения при помощи одного второго возвращающего средства. Спусковой зуб включает приводное средство, выполненное таким образом, что, когда зуб перемещается во втором радиальном направлении, противоположном первому радиальному направлению, оно взаимодействует с ответным приводным средством, содержащимся в фиксирующем зубе, для привода фиксирующего зуба во втором радиальном направлении. Когда спусковой зуб перемещается в первом радиальном направлении, приводное средство перемещается на некоторое расстояние от ответного приводного средства без привода фиксирующего зуба.
В патенте ЕР №2105806 А1 фирмы Girard Perregaux SA описывается деформируемая рама, определяющая две ортогональных оси, включающая пластинчатую пружину, изогнутую вдоль наибольшего размера и предназначенную для возврата энергии при изменениях формы пластины с двумя положениями равновесия.
В патенте ЕР No 2 221677 А1 фирмы Rolex SA описывается анкер со спусковой пружиной, рычаг которого поворачивается, преодолевая действие пружины, которая толкает стопорный элемент указанного рычага в сторону анкерного колеса; на рычаге установлен спусковой элемент, который взаимодействует со спусковым пальцем, установленным на ролике, положение которого может меняться относительно ролика баланса за счет изменения скорости баланса.
В патенте СН №60813 А на имя Шортила (Shortill) описывается рычажный анкер, анкерное колесо которого включает с обеих сторон фланца чередующиеся зубья, взаимодействующие с камнями паллет, установленными напротив друг друга и ориентированными навстречу друг другу.
В патенте ЕР №1967919 А1 фирмы ETA SA описывается анкер, создающий импульсы в тангенциальном направлении, содержащий подвижную раму в форме кольца, содержащую камни паллет, предназначенные для взаимодействия с зубьями подвижного анкера, расположенного внутри кольца.
Краткое описание изобретения
В изобретении предлагается способ преодоления ограничений известных архитектур за счет разработки компактных механизмов малой толщины, которые являются экономичными в производстве.
Для этой цели изобретение относится к анкерному механизму для часового механизма или к часам, включающим по меньшей мере один баланс и по меньшей мере одно анкерное колесо, в которых передача импульсов между указанным по меньшей мере одним балансом и указанным по меньшей мере одним анкерным колесом обеспечивается при помощи гибкого механизма из единой детали, содержащегося в указанном анкерном механизме и включающего по меньшей мере один контактный шпиндель, взаимодействующий с указанным по меньшей мере одним анкерным колесом или соответственно с указанным по меньшей мере одним балансом, и в которых указанный состоящий из единой детали гибкий механизм соединен по меньшей мере одной гибкой пластиной, содержащейся в нем, с неподвижной структурой указанных часов, либо соответственно с указанным по меньшей мере одним анкерным колесом, в которых указанный гибкий механизм из единой детали является блокирующим рычагом, который включает по меньшей мере одну подвижную раму с фиксирующими зубцами, взаимодействующими с зубьями указанного анкерного колеса, множество указанных гибких пластин, которые являются предварительно нагруженными изогнутыми гибкими пластинами, и вилку с выступами, взаимодействующими с импульсным камнем указанного баланса, и в которых указанная подвижная рама полностью окружает указанное анкерное колесо, отличаются тем, что указанные гибкие пластины продолжаются пружинами, которые выполнены за одно целое с грузами, которые либо жестко закреплены на указанной неподвижной структуре, либо имеют малую степень свободы относительно указанной структуры, ограниченную продолговатыми участками, взаимодействующими со штырями, содержащимися в указанной жесткой структуре, в направлении, ортогональном направлению поступательного перемещения, называемом абсциссой указанной подвижной рамы.
Изобретение также относится к часовому механизму, включающему неподвижную структуру и по меньшей мере один механизм данного типа.
Изобретение также относится к часам, включающим неподвижную структуру и по меньшей мере один механизм данного типа и/или по меньшей мере один часовой механизм данного типа.
Краткое описание чертежей
Прочие признаки и преимущества изобретения станут очевидны из нижеследующего подробного описания со ссылками на прилагаемые чертежи, на которых:
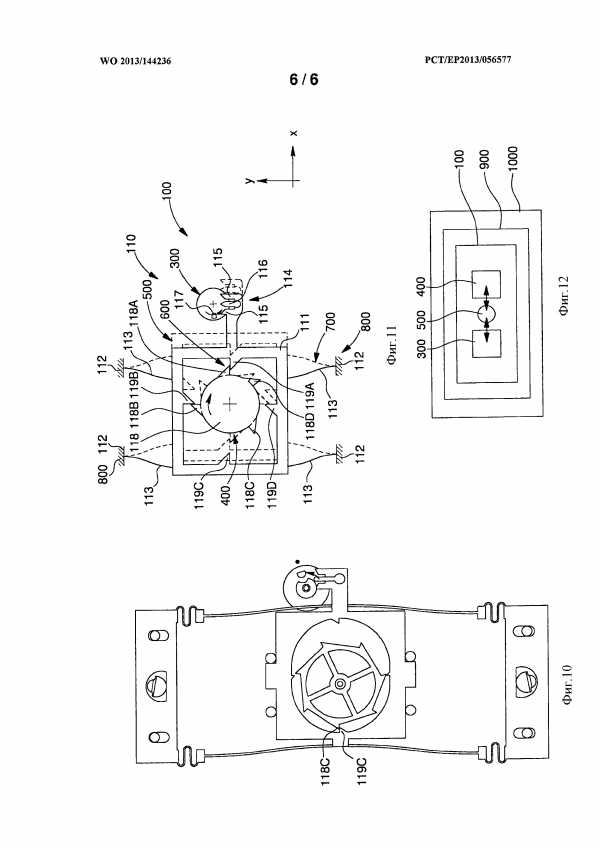
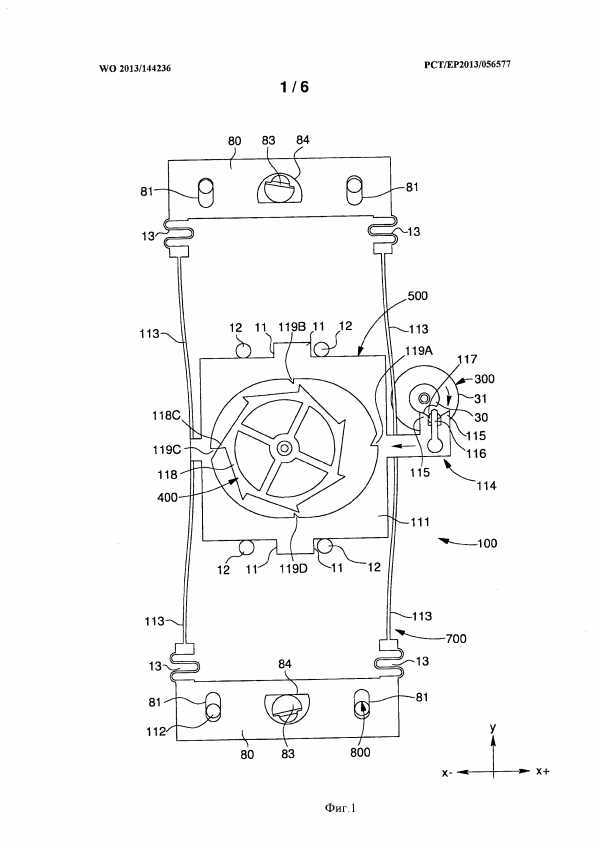
Фиг. 1-10 - схематические виды различных этапов движения конкретного варианта анкерного механизма с направляющим элементом, имеющим нулевую жесткость, который в общем виде показан на Фиг. 11 в другом упрощенном варианте;
Фиг. 12 - блок схема часов с механизмом, включающим механизм данного типа.
Подробное описание предпочтительных вариантов осуществления изобретения
Многочисленные часовые механизмы могут изготавливаться с уменьшенным числом компонентов и предпочтительно с использованием компонентов, выполненных из силикона или при помощи способа LIGA или DRIE, содержащих гибкие участки.
Эти гибкие участки могут применяться для формирования направляющих элементов, в частности направляющих шарниров, и/или для формирования упругих возвращающих средств.
«Гибкие направляющие элементы» в нижеследующем описании обозначают поступательные или вращательные направляющие элементы, содержащие одну или большее число пластин. Эти направляющие элементы обладают множеством преимуществ, среди которых, в частности, можно указать следующие: точность, отсутствие трения, отсутствие гистерезиса, отсутствие износа, отсутствие потребности в смазке, отсутствие заклинивания, возможность применения технологии изготовления монолитных деталей. Наиболее общими ограничениями являются следующие: ограниченные перемещения, малая плотность возвратной силы или момента, в некоторых случаях сложная кинематика, ограничения по воспринимаемой нагрузке.
Гибкие направляющие элементы могут модифицироваться для обеспечения нулевой жесткости или для получения двух равновесных состояний в случае компонента, который работает за счет потери устойчивости под действием напряжений, прилагаемых с обеих сторон от среднего направления, с каждой стороны от которого компонент может занимать два различных устойчивых положения.
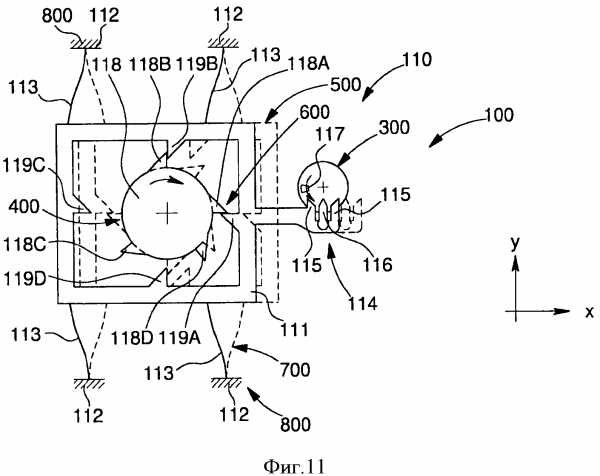
Изобретение может относиться к анкерному механизму 100 часового механизма 900 или часам 1000, включающим по меньшей мере один баланс 300 и по меньшей мере одно анкерное колесо 400.
Согласно изобретению передача импульсов между указанным по меньшей мере одним балансом 300 и указанным по меньшей мере одним анкерным колесом 400 обеспечивается через гибкий механизм 500 из единой детали. Данный гибкий механизм 500 из единой детали включает по меньшей мере один контактный шпиндель 600, взаимодействующий с указанным по меньшей мере одним анкерным колесом 400 или соответственно с указанным по меньшей мере одним балансом 300. Состоящий из единой детали гибкий механизм 500 соединен по меньшей мере одной гибкой пластиной 700 или предпочтительно множеством гибких пластин, формирующих упругие возвращающие средства, с неподвижной структурой 800 указанных часов 1000, либо соответственно с указанным по меньшей мере одним анкерным колесом 400.
Конкретный вариант осуществления изобретения проиллюстрирован на Фиг. 1-11 и относится к анкерному механизму 100 с направляющим элементом, имеющим нулевую жесткость и по существу параксиальную подвижность.
Гибкий состоящий из единой детали механизм 500, содержащийся в данном механизме, также называется блокирующим рычагом.
Он включает множество гибких пластин 700, которые являются предварительно поджатыми изогнутыми гибкими пластинами 113.
Данный механизм 100 включает подвижную раму 111, шарнирно скрепленную при помощи гибких пластин 113 с неподвижными анкерными элементами 112. Эти гибкие пластины 113 являются балками, работающими в режиме потери изгибной устойчивости.
Гибкие пластины 113 в варианте, показанном на Фиг. 1-10, продолжаются пружинами 13. Эти пружины 13 выполнены за одно целое с грузами 80, которые либо жестко закреплены на неподвижной структуре 800, либо имеют малую степень свободы относительно структуры 800, как показано на Фиг. 1-10, на которых грузы 80 включают продолговатые участки 81, которые обеспечивают степень свободы на малом ограниченном ходе относительно штырей 112, содержащихся в жесткой структуре 800. Данная степень свободы обеспечивается в одном направлении Y, называемом направлением ординаты.
В отверстии 84 груза 80 предпочтительно с каждой стороны имеется кулачок 83 для обеспечения предварительного взведения.
Подвижная рама 111 включает по меньшей мере одну нагруженную пружину, обеспечивающую ее нулевую жесткость.
На данной подвижной раме 111, которая является эквивалентом рычага с паллетами, установлена вилка 114 с выступами 115 и заостренный выступ 116. Данная вилка 114 аналогична вилке швейцарского рычага и имеет все защитные устройства, предотвращающие выталкивание и размыкание.
В проиллюстрированном на фигурах варианте подвижная рама 111 полностью окружает анкерное колесо 400, с которым она находится в одной плоскости.
Так, данный гибкий состоящий из единой детали механизм 500 является блокирующим рычагом, который включает по меньшей мере одну подвижную раму 111, на которой установлены фиксирующие зубцы 119, взаимодействующие с зубьями 118 анкерного колеса 400, множество гибких пластин 700, которые являются предварительно нагруженными изогнутыми гибкими пластинами 113, и вилку 114, на которой имеются выступы 115 для взаимодействия с импульсным камнем 117 баланса 300.
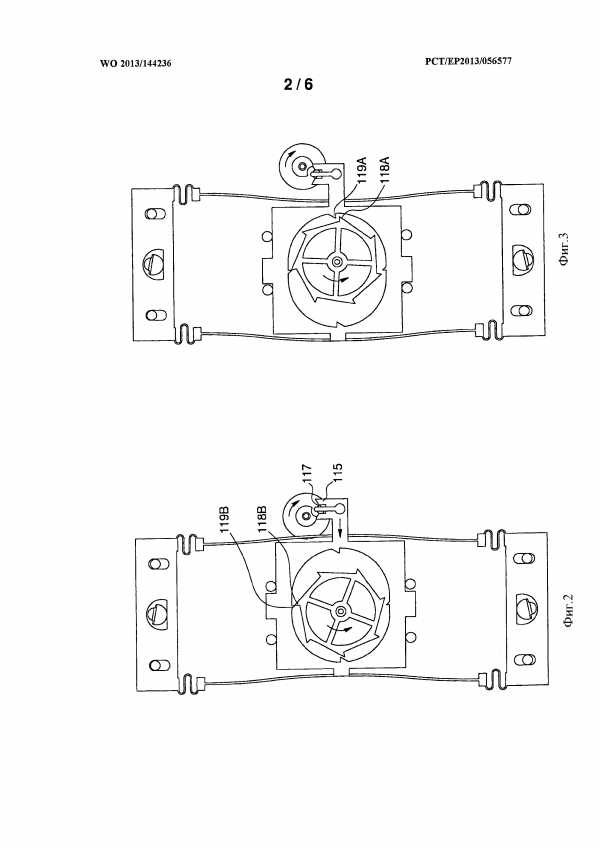
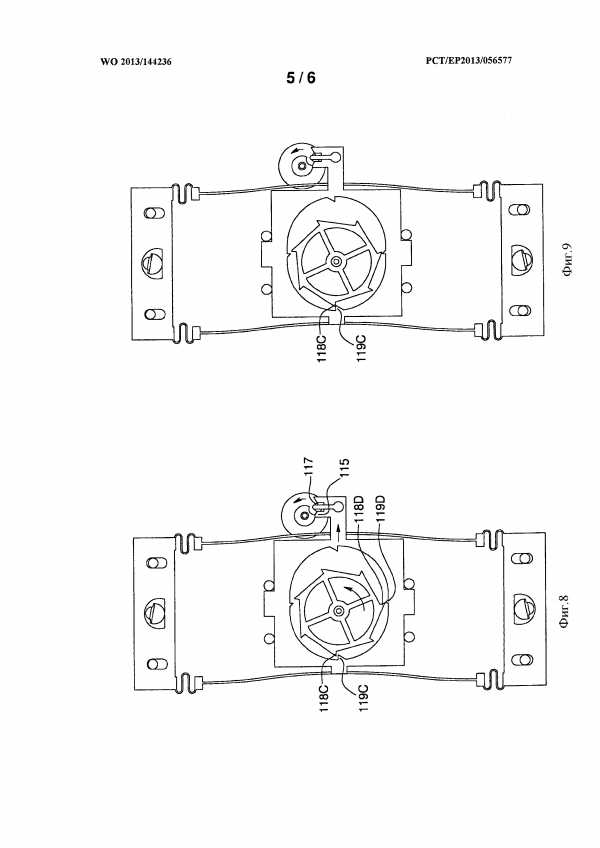
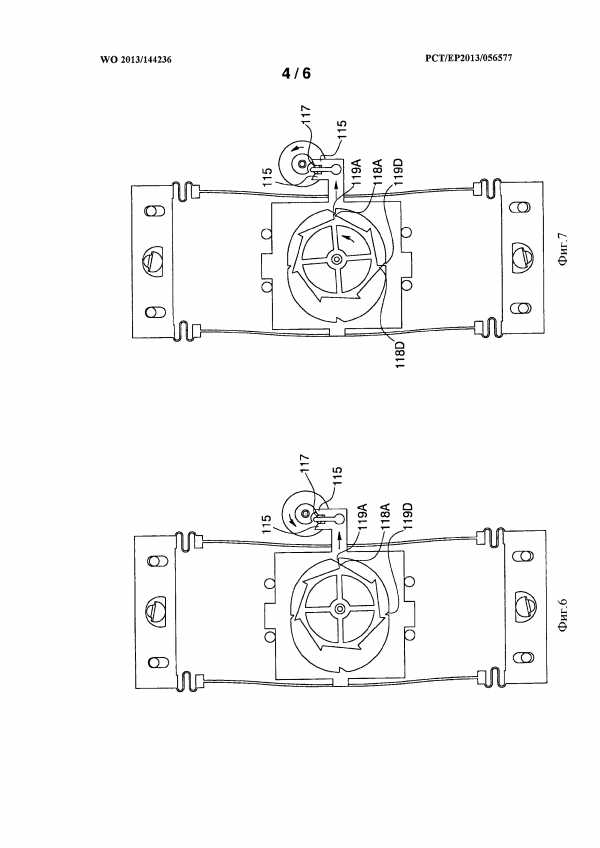
Анкерное колесо 400 включает импульсные зубья 118А, 118В и т.д., расположенные на одинаковых угловых расстояниях друг от друга (60° на Фиг. 1-10, 90° на Фиг. 11).
Предпочтительно фиксирующие зубцы 119 сгруппированы в противоположные пары. В варианте осуществления изобретения, показанном на чертежах, первая пара зубцов 119А, 119С расположена вдоль первого направления X, называемом направлением абсциссы, в котором проходит и перемещается штырь 114 вилки; а вторая пара зубцов 119В, 119D проходит во втором направлении Y, называемом направлением ординаты перпендикулярном первому направлению X.
Эти импульсные зубья 118 могут взаимодействовать с зубьями, называемыми фиксирующими зубцами 119А, 119В, 119С, 119D подвижной рамы 111, расположенными под углом 90° друг к другу.
Баланс 300, маленький ролик 30 и большой ролик 31 аналогичны соответствующим элементам стандартного швейцарского рычага. Данная подвижная рама 111 предпочтительно может перемещаться по существу параксиальным образом и в основном перемещается в направлении X. Согласно конструкции направления данная подвижная рама 111 может совершать перемещения с малой амплитудой в направлении Y ординаты в пределах, определяемых ходом гибких пластин 113 и пружин 13, эти перемещения в направлении Y обеспечивают зацепление с упором или освобождение упорных элементов.
В конкретном варианте, показанном на Фиг. 1-10, подвижная рама 111 имеет упорные грани 11 в направлении X, которые взаимодействуют или не взаимодействуют, в зависимости от положения подвижной рамы 111, с ограничительными упорными элементами 12.
Если сформулировать кратко, то фиксирующий рычаг 500 включает по меньшей мере одну подвижную раму 111, гибкие пластины 113 и вилку 114 с выступами 115.
Кинематика механизма, показанного на Фиг. 11 является следующей.
Когда импульсный камень 117 входит в контакт с выступом 115, фиксирующий зубец 119А подвижной рамы 111 освобождает анкерное колесо 400, не вызывая обратного хода, и зуб 118В анкерного колеса по существу находящийся на одном уровне с фиксирующим зубцом 119А сообщает тангенциальный импульс подвижной раме 11 рычага с паллетой на фиксирующем выступе 119В. В конце импульса зуб 118С анкерного колеса фиксируется соответствующим зубом 119С рычага с паллетами. Импульсный цикл повторяется аналогичным образом для зубьев 118D и 119D.
Увеличение нагрузки на гибкие пластины 113 может создать систему с двумя положениями равновесия. Положение импульсного зуба 118В относительно фиксирующего зубца 119А может приблизить рычаг с паллетами к неустойчивому состоянию. В результате рычаг 111 с паллетами передает импульс через анкерное колесо 400 и за счет энергии аккумулированной в гибких пластинах 113.
Система имеет все те же предохранительные устройства, что и анкерный механизм со швейцарским рычагом.
Для варианта, показанного на Фиг. 1-10, имеет место следующая кинематика. Фиг. 1: размыкание. Баланс поворачивается по часовой стрелке. Зуб 118С, который был в зацеплении с фиксирующим зубцом 119С, начинает выходить из зацепления с указанным зубцом при поступательном перемещении в левую сторону подвижной рамы 111 вдоль оси X фигуры. В начале размыкания рама находится около крайнего положения своего хода в положительном направлении оси X.
Фиг. 2: начало импульса. Зуб 118С полностью вышел из зацепления, анкерное колесо 400 совершает вращение, выступ 115 сообщает импульс импульсному камню 117, подвижная рама вернулась вдоль оси X по действием импульса, полученного от зуба 118В зубцом 119В.
Фиг. 3: конец передачи импульса. Имеющие два положения равновесия пластины 113 только что прошли два устойчивых положения. Подвижная рама 111 завершила ход в отрицательном направлении оси X под действием упругого возврата пластин 113 и находится в крайней точки хода в отрицательном направлении оси X.
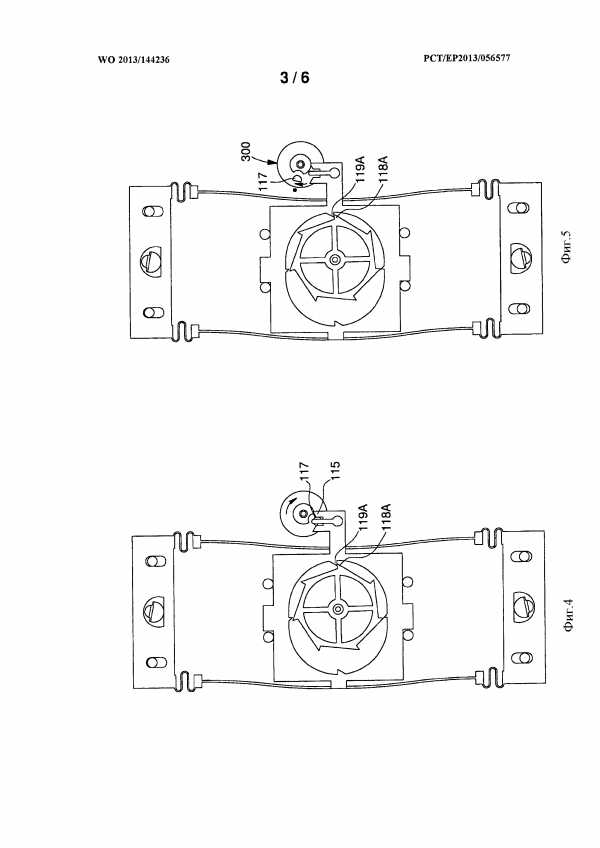
Фиг. 4: фиксирующее зацепление. Зуб 118А зацепляется с фиксирующим зубцом 119А.
Фиг. 5: полная фиксация. Зуб 118А находится в зацеплении с фиксирующим зубцом 119А. Баланс 300 описывает дополнительную дугу и приходит в точку обращения.
Фиг. 6: размыкание. Баланс 300 поворачивается против часовой стрелки. Камень 117 вновь входит во взаимодействие с выступами 115 для перемещения подвижной рамы 111 на расстояние в положительном направлении оси X, достаточное для вывода зуба 118А из зацепления с зубцом 119А.
Фиг. 7: начало импульса. Зуб 118А выходит из зацепления с зубцом 119А. Происходит поворот колеса 118. Подвижная рама 111 продолжает перемещение в положительном направлении оси X за счет воздействия на зубец 119D на зуба 118D.
Фиг. 8: конец передачи импульса. Имеющие два положения равновесия пластины 113 только что прошли два устойчивых положения. Подвижная пластина 111 завершила ход вдоль положительного направления оси X и находится в крайней точки хода в положительном направлении оси X. Зуб 118С приближается к фиксирующему зубцу 119С.
Фиг. 9: фиксирующее зацепление. Зуб 118С упирается в фиксирующий зубец 119С.
Фиг. 10: полная фиксация. Зуб 118С находится в зацеплении с фиксирующим зубцом 119С. Баланс 300 описывает дополнительную дугу и приходит в точку обращения.
Цикл продолжается так же, как и на Фиг. 1, но, безусловно, для других зубьев анкерного колеса.
Предпочтительно в этом варианте на Фиг. 1-10 сила, создаваемая нагруженными пружинами 12, на 10-15% больше максимальной нагрузки, при которой происходит потеря устойчивости гибких пластин 113, для обеспечения упора граней 11 рамы 111 в ограничивающие упорные элементы 12.
Сила этих нагруженных пружин также имеет верхний предел, обеспечивающий самозапуск, и этот предел является функцией инерции балансира.
Фиксирующий механизм, показанный здесь, имеет один уровень. Также возможно изготовление механизма на нескольких уровнях, в частности, с расположением зубцов (импульсных и фиксирующих) на разных уровнях.
В конкретном варианте осуществления изобретения для баланса, колеблющегося с частотой 4 Гц, и силиконового фиксирующего механизма 500 данного типа с высотой пластины 0.15 мм, ходом фиксирующего рычага +/- 0.35 мм и полной фиксацией 0.05 мм, правильное функционирование, которое также обеспечивает самозапуск, достигается при следующих различных конфигурациях:
- момент инерции баланса 4 мг⋅см2; длина гибкой пластины 5.0 мм; толщина пластины 0.02 мм, критическая нагрузка, вызывающая потерю устойчивости, 5.8 мН, нагрузка пружины 6.9 мН; момент инерции баланса 9 мг⋅см2; длина гибкой пластины 5.0 мм;
- толщина пластины 0.02 мм, критическая нагрузка, вызывающая потерю устойчивости, 5.8 мН, нагрузка пружины 6.9 мН;
- момент инерции баланса 9 мг⋅см2;
- длина гибкой пластины 5.0 мм;
- толщина пластины 0.02 мм, критическая нагрузка, вызывающая потерю устойчивости, 5.8 мН, нагрузка пружины 7,2 мН;
. момент инерции баланса 4 мг⋅см2; длина гибкой пластины 1.7 мм;
- толщина пластины 0.01 мм, критическая нагрузка, вызывающая потерю устойчивости, 6.2 мН, нагрузка пружины 7.2 мН.
Изобретение также относится к часовому механизму 900, включающему по меньшей мере один гибкий механизм данного типа и, в частности, включающему неподвижную структуру 800 и по меньшей мере один механизм 100 данного типа.
Изобретение также относится к часам 1000, в частности к наручным часам, включающим по меньшей мере один часовой механизм 900 данного типа и/или один гибкий механизм данного типа, в частности включающий неподвижную структуру 800 и по меньшей мере один механизм 100 данного типа.
1. Анкерный механизм (100) для часового механизма (900) или часов (1000), включающий по меньшей мере один баланс (300) и по меньшей мере одно анкерное колесо (400), причем передача импульсов между указанным по меньшей мере одним балансом (300) и указанным по меньшей мере одним анкерным колесом (400) осуществляется при помощи гибкого механизма(500) из единой детали содержащегося в анкерном механизме (100) и включающего по меньшей мере один контактный шпиндель (600), взаимодействующий с указанным по меньшей мере одним анкерным колесом (400) или, соответственно, с указанным по меньшей мере одним балансом (300), при этом указанный состоящий из единой детали гибкий механизм (500) соединен по меньшей мере одной гибкой пластиной (700), содержащейся в нем, с неподвижной структурой (800) указанных часов (1000V либо, соответственно, с указанным по меньшей мере одним анкерным колесом (400), при этом указанный состоящий из единой детали гибкий механизм (500) является фиксирующим рычагом, который включает по меньшей мере одну подвижную раму (111) с фиксирующими зубцами (119), взаимодействующими с зубьями (118) указанного анкерного колеса (400), множество указанных гибких пластин (700), которые являются предварительно нагруженными изогнутыми гибкими пластинами (113), и вилку (114) с выступами (115) для взаимодействия с импульсным камнем (117) указанного баланса (300), при этом указанная подвижная рама (111) полностью окружает указанное анкерное колесо (400), отличающийся тем, что указанные гибкие пластины (113) продолжаются пружинами (13), которые выполнены за одно целое с грузами (80), которые либо жестко закреплены на указанной неподвижной структуре (800), либо имеют малую степень свободы относительно указанной структуры (800), ограниченную продольными участками (81), взаимодействующими со штырями (112), содержащимися в указанной жесткой структуре (800) в направлении, ортогональном направлению поступательного перемещения, называемому направлением (X) абсциссы указанной подвижной рамы (111).
2. Механизм (100) по п. 1, отличающийся тем, что указанная подвижная рама (111) формирует рычаг с паллетами, выполненный с возможностью поступательного перемещения в указанном направлении (X) поступательного перемещения, и включает по меньшей мере одну нагруженную пружину, обеспечивающую для указанной рамы нулевую жесткость, указанный механизм (100) выполнен таким образом, что когда указанный камень (117) входит в контакт с выступом (115), один указанный зубец (119) указанной подвижной рамы (111) выходит из зацепления с указанным анкерным колесом (400), не вызывая обратного хода, и зуб (118) указанного анкерного колеса (400) в положении, по существу перпендикулярном указанному зубу (119), сообщает тангенциальный импульс указанной подвижной раме (111), и тем, что в конце передачи импульса зуб (118) указанного анкерного колеса (400) останавливается соответствующим зубом (119) указанной подвижной рамы (111).
3. Механизм (100) по п. 1, отличающийся тем, что нагрузка указанных гибких пластин (113) рассчитывается таким образом, чтобы обеспечить создание системы с двумя положениями равновесия, и тем, что положение указанного импульсного зуба (118) относительно указанного фиксирующего зубца (119) может приблизить указанную подвижную раму (111) к неустойчивому положению для того, чтобы указанная рама обеспечила импульс через указанное анкерное колесо (400) и за счет энергии, аккумулированной в указанных гибких пластинах (113).
4. Механизм (100) по п. 1, отличающийся тем, что указанные гибкие пластины (113) продолжаются пружинами (13), которые выполнены за одно целое с грузами (80), которые либо неподвижно закреплены на указанной неподвижной структуре (800), либо имеют малую степень свободы относительно указанной структуры (800), ограниченную продолговатыми участками (81), взаимодействующими со штырями (112), содержащимися в указанной жесткой структуре (800), в направлении, ортогональном относительно направления поступательного перемещения указанной подвижной рамы (111).
5. Механизм (100) по п. 1, отличающийся тем, что механизм включает по меньшей мере один кулачок (83) в отверстии (84) указанного груза (80), указанный кулачок (83) предназначен для предварительного взведения указанных гибких пластин (113).
6. Механизм (100) по п. 1, отличающийся тем, что указанная подвижная рама (111) включает упорные грани (11) в направлении поступательного перемещения указанной рамы, упирающиеся в конце хода в ограничивающие упорные элементы (12).
7. Механизм (100) по п. 4, отличающийся тем, что указанная подвижная рама (111) включает упорные поверхности (11) в направлении поступательного перемещения указанной рамы, упирающиеся в конце хода в ограничительные упорные элементы (12), и тем, что усилие, обеспечиваемое указанной по меньшей мере одной нагруженной пружиной (13), на 10-15% больше, чем максимальное усилие, вызывающее потерю устойчивости указанных гибких пластин (113), для обеспечения упора указанных упорных граней (11) указанной подвижной рамы (111) в указанные ограничивающие упорные элементы (12).
8. Механизм (100) по п. 1, отличающийся тем, что указанные фиксирующие зубцы (119) сгруппированы в противоположные пары.
9. Механизм (100) по п. 8, отличающийся тем, что первая пара зубцов (119А; 119С) расположена вдоль указанного первого направления (X) абсциссы, в котором проходит и перемещается штырь указанной вилки (114), а вторая пара зубцов (119В; 119D) проходит во втором направлении (Y), перпендикулярном указанному первому направлению (X) абсциссы.
10. Часовой механизм (900), включающий неподвижную структуру (800) и по меньшей мере один указанный механизм (100) по п. 1.
11. Часы (1000), включающие неподвижную структуру (800) и по меньшей мере один указанный механизм (100) по п. 1 и/или по меньшей мере один часовой механизм (900) по п. 10.
www.findpatent.ru
МЕХАНИЗМ АНКЕРНЫЙ ГИБКИЙ С ПОДВИЖНОЙ РАМОЙ
Область техники
Изобретение относится к анкерному механизму часового механизма или часам, включающим по меньшей мере один баланс и по меньшей мере одно анкерное колесо, в которых передача импульсов передача импульсов между указанным по меньшей мере одним балансом и указанным по меньшей мере одним анкерным колесом осуществляется при помощи гибкого механизма из единой детали, содержащегося в указанном анкерном механизме и включающего по меньшей мере один контактный шпиндель, взаимодействующий с указанным по меньшей мере одним анкерным колесом или соответственно с указанным по меньшей мере одним балансом, и в которых указанный состоящий из единой детали гибкий механизм является блокирующим рычагом, который включает по меньшей мере одну подвижную раму с фиксирующими зубцами для взаимодействия с зубьями указанного анкерного колеса, множество указанных гибких пластин, которые являются предварительно нагруженными изогнутыми гибкими пластинами, и вилку с выступами для взаимодействия с импульсным камнем указанного баланса, и в которых указанная подвижная рама полностью окружает указанное анкерное колесо.
Изобретение также относится к часовому механизму, включающему неподвижную структуру и по меньшей мере один механизм данного типа.
Изобретение также относится к часам, включающим неподвижную структуру и по меньшей мере один механизм данного типа и/или по меньшей мере один часовой механизм данного типа.
Изобретение относится к области часовых механизмов, а более конкретно - к области анкерных механизмов.
Уровень техники
Для обеспечения производительности при изготовлении часов требуются высокоточные механизмы с минимальными требованиями к габаритам и малым числом компонентов для контроля затрат на изготовление, сборку и регулировку. Технологии LIGA и DRIE обеспечивают изготовление гибких точных компонентов и являются перспективной альтернативой для стандартных схем, которые отличаются большим числом компонентов и сложностью регулировок.
Международный патент WO No 2011/120180 А1 фирмы Rolex SA, описывает паллетный двуплечий блокирующий рычаг, каждое плечо которого снабжено камнем паллеты для зацепления с одним и тем же зубчатым колесом, при этом два эластичных плеча соединяют тормозной рычаг с рамой, которая позволяет ему поворачиваться, а третий эластичный элемент по существу формирует систему с двумя положениями равновесия.
В патенте УЗ №2037335 А2 фирмы Enzler & Von Gunten описывается состоящий из единой детали швейцарский рычаг с двумя плечами, каждое из которых снабжено камнем паллеты, и включающий плечи, сформированные гибкими пластинами, объединенными в структуру и определяющими виртуальную ось.
В патенте ЕР №2450755 А1 фирмы Nivarox описывается анкерное колесо часового механизма, включающее множество зубчатых колес, которые являются соосными, вращаются синхронно относительно шарнирной оси и включают по меньшей мере одно первое импульсное колесо в одной первой импульсной плоскости и по меньшей мере одно второе зубчатое спусковое колесо в одной второй упорной плоскости, параллельной или совпадающей с первой импульсной плоскостью. Второе спусковое зубчатое колесо включает по меньшей мере один подвижный узел, который включает, с одной стороны, по меньшей мере один спусковой зуб, который может перемещаться в радиальном направлении относительно шарнирной оси и возвращается в положение равновесия первый возвращающим средством, и, с другой стороны, по меньшей мере один фиксирующий зуб, возвращаемый в первом радиальном направлении в сторону фиксированного положения при помощи одного второго возвращающего средства. Спусковой зуб включает приводное средство, выполненное таким образом, что, когда зуб перемещается во втором радиальном направлении, противоположном первому радиальному направлению, оно взаимодействует с ответным приводным средством, содержащимся в фиксирующем зубе, для привода фиксирующего зуба во втором радиальном направлении. Когда спусковой зуб перемещается в первом радиальном направлении, приводное средство перемещается на некоторое расстояние от ответного приводного средства без привода фиксирующего зуба.
В патенте ЕР №2105806 А1 фирмы Girard Perregaux SA описывается деформируемая рама, определяющая две ортогональных оси, включающая пластинчатую пружину, изогнутую вдоль наибольшего размера и предназначенную для возврата энергии при изменениях формы пластины с двумя положениями равновесия.
В патенте ЕР No 2 221677 А1 фирмы Rolex SA описывается анкер со спусковой пружиной, рычаг которого поворачивается, преодолевая действие пружины, которая толкает стопорный элемент указанного рычага в сторону анкерного колеса; на рычаге установлен спусковой элемент, который взаимодействует со спусковым пальцем, установленным на ролике, положение которого может меняться относительно ролика баланса за счет изменения скорости баланса.
В патенте СН №60813 А на имя Шортила (Shortill) описывается рычажный анкер, анкерное колесо которого включает с обеих сторон фланца чередующиеся зубья, взаимодействующие с камнями паллет, установленными напротив друг друга и ориентированными навстречу друг другу.
В патенте ЕР №1967919 А1 фирмы ETA SA описывается анкер, создающий импульсы в тангенциальном направлении, содержащий подвижную раму в форме кольца, содержащую камни паллет, предназначенные для взаимодействия с зубьями подвижного анкера, расположенного внутри кольца.
Краткое описание изобретения
В изобретении предлагается способ преодоления ограничений известных архитектур за счет разработки компактных механизмов малой толщины, которые являются экономичными в производстве.
Для этой цели изобретение относится к анкерному механизму для часового механизма или к часам, включающим по меньшей мере один баланс и по меньшей мере одно анкерное колесо, в которых передача импульсов между указанным по меньшей мере одним балансом и указанным по меньшей мере одним анкерным колесом обеспечивается при помощи гибкого механизма из единой детали, содержащегося в указанном анкерном механизме и включающего по меньшей мере один контактный шпиндель, взаимодействующий с указанным по меньшей мере одним анкерным колесом или соответственно с указанным по меньшей мере одним балансом, и в которых указанный состоящий из единой детали гибкий механизм соединен по меньшей мере одной гибкой пластиной, содержащейся в нем, с неподвижной структурой указанных часов, либо соответственно с указанным по меньшей мере одним анкерным колесом, в которых указанный гибкий механизм из единой детали является блокирующим рычагом, который включает по меньшей мере одну подвижную раму с фиксирующими зубцами, взаимодействующими с зубьями указанного анкерного колеса, множество указанных гибких пластин, которые являются предварительно нагруженными изогнутыми гибкими пластинами, и вилку с выступами, взаимодействующими с импульсным камнем указанного баланса, и в которых указанная подвижная рама полностью окружает указанное анкерное колесо, отличаются тем, что указанные гибкие пластины продолжаются пружинами, которые выполнены за одно целое с грузами, которые либо жестко закреплены на указанной неподвижной структуре, либо имеют малую степень свободы относительно указанной структуры, ограниченную продолговатыми участками, взаимодействующими со штырями, содержащимися в указанной жесткой структуре, в направлении, ортогональном направлению поступательного перемещения, называемом абсциссой указанной подвижной рамы.
Изобретение также относится к часовому механизму, включающему неподвижную структуру и по меньшей мере один механизм данного типа.
Изобретение также относится к часам, включающим неподвижную структуру и по меньшей мере один механизм данного типа и/или по меньшей мере один часовой механизм данного типа.
Краткое описание чертежей
Прочие признаки и преимущества изобретения станут очевидны из нижеследующего подробного описания со ссылками на прилагаемые чертежи, на которых:
Фиг. 1-10 - схематические виды различных этапов движения конкретного варианта анкерного механизма с направляющим элементом, имеющим нулевую жесткость, который в общем виде показан на Фиг. 11 в другом упрощенном варианте;
Фиг. 12 - блок схема часов с механизмом, включающим механизм данного типа.
Подробное описание предпочтительных вариантов осуществления изобретения
Многочисленные часовые механизмы могут изготавливаться с уменьшенным числом компонентов и предпочтительно с использованием компонентов, выполненных из силикона или при помощи способа LIGA или DRIE, содержащих гибкие участки.
Эти гибкие участки могут применяться для формирования направляющих элементов, в частности направляющих шарниров, и/или для формирования упругих возвращающих средств.
«Гибкие направляющие элементы» в нижеследующем описании обозначают поступательные или вращательные направляющие элементы, содержащие одну или большее число пластин. Эти направляющие элементы обладают множеством преимуществ, среди которых, в частности, можно указать следующие: точность, отсутствие трения, отсутствие гистерезиса, отсутствие износа, отсутствие потребности в смазке, отсутствие заклинивания, возможность применения технологии изготовления монолитных деталей. Наиболее общими ограничениями являются следующие: ограниченные перемещения, малая плотность возвратной силы или момента, в некоторых случаях сложная кинематика, ограничения по воспринимаемой нагрузке.
Гибкие направляющие элементы могут модифицироваться для обеспечения нулевой жесткости или для получения двух равновесных состояний в случае компонента, который работает за счет потери устойчивости под действием напряжений, прилагаемых с обеих сторон от среднего направления, с каждой стороны от которого компонент может занимать два различных устойчивых положения.
Изобретение может относиться к анкерному механизму 100 часового механизма 900 или часам 1000, включающим по меньшей мере один баланс 300 и по меньшей мере одно анкерное колесо 400.
Согласно изобретению передача импульсов между указанным по меньшей мере одним балансом 300 и указанным по меньшей мере одним анкерным колесом 400 обеспечивается через гибкий механизм 500 из единой детали. Данный гибкий механизм 500 из единой детали включает по меньшей мере один контактный шпиндель 600, взаимодействующий с указанным по меньшей мере одним анкерным колесом 400 или соответственно с указанным по меньшей мере одним балансом 300. Состоящий из единой детали гибкий механизм 500 соединен по меньшей мере одной гибкой пластиной 700 или предпочтительно множеством гибких пластин, формирующих упругие возвращающие средства, с неподвижной структурой 800 указанных часов 1000, либо соответственно с указанным по меньшей мере одним анкерным колесом 400.
Конкретный вариант осуществления изобретения проиллюстрирован на Фиг. 1-11 и относится к анкерному механизму 100 с направляющим элементом, имеющим нулевую жесткость и по существу параксиальную подвижность.
Гибкий состоящий из единой детали механизм 500, содержащийся в данном механизме, также называется блокирующим рычагом.
Он включает множество гибких пластин 700, которые являются предварительно поджатыми изогнутыми гибкими пластинами 113.
Данный механизм 100 включает подвижную раму 111, шарнирно скрепленную при помощи гибких пластин 113 с неподвижными анкерными элементами 112. Эти гибкие пластины 113 являются балками, работающими в режиме потери изгибной устойчивости.
Гибкие пластины 113 в варианте, показанном на Фиг. 1-10, продолжаются пружинами 13. Эти пружины 13 выполнены за одно целое с грузами 80, которые либо жестко закреплены на неподвижной структуре 800, либо имеют малую степень свободы относительно структуры 800, как показано на Фиг. 1-10, на которых грузы 80 включают продолговатые участки 81, которые обеспечивают степень свободы на малом ограниченном ходе относительно штырей 112, содержащихся в жесткой структуре 800. Данная степень свободы обеспечивается в одном направлении Y, называемом направлением ординаты.
В отверстии 84 груза 80 предпочтительно с каждой стороны имеется кулачок 83 для обеспечения предварительного взведения.
Подвижная рама 111 включает по меньшей мере одну нагруженную пружину, обеспечивающую ее нулевую жесткость.
На данной подвижной раме 111, которая является эквивалентом рычага с паллетами, установлена вилка 114 с выступами 115 и заостренный выступ 116. Данная вилка 114 аналогична вилке швейцарского рычага и имеет все защитные устройства, предотвращающие выталкивание и размыкание.
В проиллюстрированном на фигурах варианте подвижная рама 111 полностью окружает анкерное колесо 400, с которым она находится в одной плоскости.
Так, данный гибкий состоящий из единой детали механизм 500 является блокирующим рычагом, который включает по меньшей мере одну подвижную раму 111, на которой установлены фиксирующие зубцы 119, взаимодействующие с зубьями 118 анкерного колеса 400, множество гибких пластин 700, которые являются предварительно нагруженными изогнутыми гибкими пластинами 113, и вилку 114, на которой имеются выступы 115 для взаимодействия с импульсным камнем 117 баланса 300.
Анкерное колесо 400 включает импульсные зубья 118А, 118В и т.д., расположенные на одинаковых угловых расстояниях друг от друга (60° на Фиг. 1-10, 90° на Фиг. 11).
Предпочтительно фиксирующие зубцы 119 сгруппированы в противоположные пары. В варианте осуществления изобретения, показанном на чертежах, первая пара зубцов 119А, 119С расположена вдоль первого направления X, называемом направлением абсциссы, в котором проходит и перемещается штырь 114 вилки; а вторая пара зубцов 119В, 119D проходит во втором направлении Y, называемом направлением ординаты перпендикулярном первому направлению X.
Эти импульсные зубья 118 могут взаимодействовать с зубьями, называемыми фиксирующими зубцами 119А, 119В, 119С, 119D подвижной рамы 111, расположенными под углом 90° друг к другу.
Баланс 300, маленький ролик 30 и большой ролик 31 аналогичны соответствующим элементам стандартного швейцарского рычага. Данная подвижная рама 111 предпочтительно может перемещаться по существу параксиальным образом и в основном перемещается в направлении X. Согласно конструкции направления данная подвижная рама 111 может совершать перемещения с малой амплитудой в направлении Y ординаты в пределах, определяемых ходом гибких пластин 113 и пружин 13, эти перемещения в направлении Y обеспечивают зацепление с упором или освобождение упорных элементов.
В конкретном варианте, показанном на Фиг. 1-10, подвижная рама 111 имеет упорные грани 11 в направлении X, которые взаимодействуют или не взаимодействуют, в зависимости от положения подвижной рамы 111, с ограничительными упорными элементами 12.
Если сформулировать кратко, то фиксирующий рычаг 500 включает по меньшей мере одну подвижную раму 111, гибкие пластины 113 и вилку 114 с выступами 115.
Кинематика механизма, показанного на Фиг. 11 является следующей.
Когда импульсный камень 117 входит в контакт с выступом 115, фиксирующий зубец 119А подвижной рамы 111 освобождает анкерное колесо 400, не вызывая обратного хода, и зуб 118В анкерного колеса по существу находящийся на одном уровне с фиксирующим зубцом 119А сообщает тангенциальный импульс подвижной раме 11 рычага с паллетой на фиксирующем выступе 119В. В конце импульса зуб 118С анкерного колеса фиксируется соответствующим зубом 119С рычага с паллетами. Импульсный цикл повторяется аналогичным образом для зубьев 118D и 119D.
Увеличение нагрузки на гибкие пластины 113 может создать систему с двумя положениями равновесия. Положение импульсного зуба 118В относительно фиксирующего зубца 119А может приблизить рычаг с паллетами к неустойчивому состоянию. В результате рычаг 111 с паллетами передает импульс через анкерное колесо 400 и за счет энергии аккумулированной в гибких пластинах 113.
Система имеет все те же предохранительные устройства, что и анкерный механизм со швейцарским рычагом.
Для варианта, показанного на Фиг. 1-10, имеет место следующая кинематика. Фиг. 1: размыкание. Баланс поворачивается по часовой стрелке. Зуб 118С, который был в зацеплении с фиксирующим зубцом 119С, начинает выходить из зацепления с указанным зубцом при поступательном перемещении в левую сторону подвижной рамы 111 вдоль оси X фигуры. В начале размыкания рама находится около крайнего положения своего хода в положительном направлении оси X.
Фиг. 2: начало импульса. Зуб 118С полностью вышел из зацепления, анкерное колесо 400 совершает вращение, выступ 115 сообщает импульс импульсному камню 117, подвижная рама вернулась вдоль оси X по действием импульса, полученного от зуба 118В зубцом 119В.
Фиг. 3: конец передачи импульса. Имеющие два положения равновесия пластины 113 только что прошли два устойчивых положения. Подвижная рама 111 завершила ход в отрицательном направлении оси X под действием упругого возврата пластин 113 и находится в крайней точки хода в отрицательном направлении оси X.
Фиг. 4: фиксирующее зацепление. Зуб 118А зацепляется с фиксирующим зубцом 119А.
Фиг. 5: полная фиксация. Зуб 118А находится в зацеплении с фиксирующим зубцом 119А. Баланс 300 описывает дополнительную дугу и приходит в точку обращения.
Фиг. 6: размыкание. Баланс 300 поворачивается против часовой стрелки. Камень 117 вновь входит во взаимодействие с выступами 115 для перемещения подвижной рамы 111 на расстояние в положительном направлении оси X, достаточное для вывода зуба 118А из зацепления с зубцом 119А.
Фиг. 7: начало импульса. Зуб 118А выходит из зацепления с зубцом 119А. Происходит поворот колеса 118. Подвижная рама 111 продолжает перемещение в положительном направлении оси X за счет воздействия на зубец 119D на зуба 118D.
Фиг. 8: конец передачи импульса. Имеющие два положения равновесия пластины 113 только что прошли два устойчивых положения. Подвижная пластина 111 завершила ход вдоль положительного направления оси X и находится в крайней точки хода в положительном направлении оси X. Зуб 118С приближается к фиксирующему зубцу 119С.
Фиг. 9: фиксирующее зацепление. Зуб 118С упирается в фиксирующий зубец 119С.
Фиг. 10: полная фиксация. Зуб 118С находится в зацеплении с фиксирующим зубцом 119С. Баланс 300 описывает дополнительную дугу и приходит в точку обращения.
Цикл продолжается так же, как и на Фиг. 1, но, безусловно, для других зубьев анкерного колеса.
Предпочтительно в этом варианте на Фиг. 1-10 сила, создаваемая нагруженными пружинами 12, на 10-15% больше максимальной нагрузки, при которой происходит потеря устойчивости гибких пластин 113, для обеспечения упора граней 11 рамы 111 в ограничивающие упорные элементы 12.
Сила этих нагруженных пружин также имеет верхний предел, обеспечивающий самозапуск, и этот предел является функцией инерции балансира.
Фиксирующий механизм, показанный здесь, имеет один уровень. Также возможно изготовление механизма на нескольких уровнях, в частности, с расположением зубцов (импульсных и фиксирующих) на разных уровнях.
В конкретном варианте осуществления изобретения для баланса, колеблющегося с частотой 4 Гц, и силиконового фиксирующего механизма 500 данного типа с высотой пластины 0.15 мм, ходом фиксирующего рычага +/- 0.35 мм и полной фиксацией 0.05 мм, правильное функционирование, которое также обеспечивает самозапуск, достигается при следующих различных конфигурациях:
- момент инерции баланса 4 мг⋅см2; длина гибкой пластины 5.0 мм; толщина пластины 0.02 мм, критическая нагрузка, вызывающая потерю устойчивости, 5.8 мН, нагрузка пружины 6.9 мН; момент инерции баланса 9 мг⋅см2; длина гибкой пластины 5.0 мм;
- толщина пластины 0.02 мм, критическая нагрузка, вызывающая потерю устойчивости, 5.8 мН, нагрузка пружины 6.9 мН;
- момент инерции баланса 9 мг⋅см2;
- длина гибкой пластины 5.0 мм;
- толщина пластины 0.02 мм, критическая нагрузка, вызывающая потерю устойчивости, 5.8 мН, нагрузка пружины 7,2 мН;
. момент инерции баланса 4 мг⋅см2; длина гибкой пластины 1.7 мм;
- толщина пластины 0.01 мм, критическая нагрузка, вызывающая потерю устойчивости, 6.2 мН, нагрузка пружины 7.2 мН.
Изобретение также относится к часовому механизму 900, включающему по меньшей мере один гибкий механизм данного типа и, в частности, включающему неподвижную структуру 800 и по меньшей мере один механизм 100 данного типа.
Изобретение также относится к часам 1000, в частности к наручным часам, включающим по меньшей мере один часовой механизм 900 данного типа и/или один гибкий механизм данного типа, в частности включающий неподвижную структуру 800 и по меньшей мере один механизм 100 данного типа.
edrid.ru
Часы. От гномона до атомных часов. Раритетные издания. Наука и техника
Станислав Михаль
Функциональные элементы механических часов
Свободные спусковые механизмы для малогабаритных часов
Дальнейшее стремление к освобождению осциллятора от всех внешних влияний (кроме импульсов, необходимых для сохранения постоянства амплитуды колебаний) привело к созданию свободных спусковых механизмов, сконструированных так, чтобы их осцилляторы могли свободно колебаться в течение большей части периода колебания.
Одной из главных частей таких свободных спусковых механизмов был стопорный механизм, который при отходе осциллятора останавливал спусковое колесо. Первый свободный стопорный спуск для малых часов построил в 1748 г. Пьер Леруа (1717...1785), а в 1766 г. он установил его в морском хронометре.
В начале XVIII в. начал работать над развитием хронометрового спускового механизма английский часовщик Джон Гаррисон (1693...1776). Толчок этому дало английское правительство, которое в 1714 г. объявило премию в 10000 фунтов тому, кто изобретет достаточно точный способ определения географической долготы (с точностью в 1°) при плавании из Англии в Индию. Вознаграждение могло быть повышено до 15000 фунтов в случае снижения погрешности до 40' и, наконец, до 20 000 фунтов при снижении погрешности до 30'. Напомним, что угол в 1° соответствует 4 мин времени. Главный приз попытался получить именно Гаррисон, бывший столяр из Йоркшира, который работал над решением этой проблемы примерно 40 лет своей жизни. После ряда экспериментов он осуществил в 1764 г. решающее испытание на судне «Тартар», плававшем из Портсмута на Ямайку. Его хронометр №4 допустил за 150 дней плавания ошибку только в 54 с и выполнил поставленное условие для получения главной премии. Однако после долгих проволочек Гаррисон смог получить лишь половину обещанной суммы, поскольку адмиралтейство обусловило выплату остальной части денег достижением одинаковой точности другими такими же хронометрами при других рейсах.
Первые опыты Леруа со свободным хронометровым спусковым механизмом были продолжены также Берту.
Завершению развития хронометрового свободного спускового механизма способствовали во второй половине XVIII в. двое известных английских часовщиков – Джон Арнольд (1744...1799) и Томас Ирншау (1749 – 1814). В конструкциях свободных стопорных хронометрических спусковых механизмов они создали два основных направления. Первое из них осуществлено прежде всего применительно к морским хронометрам: оно имело неподвижный стопор в виде длинной поверхности на одном конце защемленной пружины, возвращавшейся в первоначальное положение силой собственной упругой деформации. Другое направление отдавало преимущество стопору, возвращаемому спиральной пружиной.
Хотя существует еще целый ряд других хронометровых спусковых механизмов, мы упомянем лишь о двух наиболее важных с исторической точки зрения. Первый из них изготовил Ирншау, а второй, с двойным спусковым колесом, – дело рук известного датского часовщика Урбана Юргенсена (1777...1830), который особо отличался изготовлением хронометров и астрономических часов. Двухколесный хронометрический спусковой механизм Юргенсена отличался большой величиной импульса. Однако, несмотря на хорошие результаты этого изобретения, оно в конечном итоге уступило на практике место более простым одноколесным спусковым механизмам.
Созданию малого, надежного и притом доступного широким слоям общества хронометрического спускового механизма способствовало изобретение, в его первоначальном виде сделанное около 1760 г. учеником Грагама Томасом Мюджем (1715...1794). Анкерный спусковой механизм полностью отличался от хронометрового спускового механизма; он был основан на принципе спокойных маятниковых спусковых механизмов без отхода с той разницей, что баланс двигался свободно и независимо от спуска в течение значительной части времени своего колебания. Свободный анкерный спуск прошел сложный путь развития. Первоначальную идею Мюджа воспринял в 1825 г. Джордж Огюст Лешо (1800 – 1884) из Женевы. Он изменил форму палет на анкере и превратил первоначальный спуск покоя в свободный. Спуск Мюджа, видоизмененный Лешо, известен теперь под названием «английский свободный анкерный спуск» (рис. 17).
Рис. 17. Свободный анкерный спусковой механизм
Рис. 18. Швейцарский анкерный спусковой механизм
Новым элементом в геометрии этого спуска было введение угла притяжки (рис. 18).
Задача заключалась в том, чтобы давлением спускового колеса прижимало анкерную вилку при свободном движении осциллятора всегда попеременно к одному из упоров 1 или 2. Наличие угла притяжки должно было надежно закреплять анкер в его крайних положениях, но, несмотря на это, анкерная вилка еще была снабжена копьем 3, расположенным между рожками вилки, а баланс – предохранительным роликом 4 над направляющей 5 с импульсным камнем, надетым на вал баланса 6. Ось спускового колеса, анкера и баланса у этого спуска расположены, как правило, на одной прямой; угловое отклонение анкера обычно составляет 10°, амплитуда баланса ±220°. Угол между входом и выходом импульсного цилиндра из сцепления с анкерной вилкой, приведенный к оси баланса, обычно составляет 40°.
Английский свободный анкерный спуск страдал некоторыми недостатками, например сравнительно большим скачком спускового колеса, что сопровождалось большой потерей энергии. Поэтому позднее перешли к более совершенному швейцарскому анкерному спуску со скошенными зубьями на спусковом колесе 7. Новый профиль зубьев спускового колеса изменил характер импульса так, что часть импульса стала передаваться со спускового колеса по палетам анкера. Это изменение дало возможность использовать определенную часть зуба для импульса, что существенно улучшило энергетический баланс спуска.
Следовательно, у этого спуска возникает импульс сначала на передней грани зуба спускового колеса, а затем на задней грани палеты анкера. Анкерная вилка современного, теперь повсеместно признаваемого спускового механизма имеет в большинстве случаев несимметричную форму. Это нужно для того, чтобы поверхности захвата обеих палет были одинаково удалены от оси вилки и чтобы, моменты притяжки были одинаковыми в обоих крайних положениях. Выполнение этого условия выгодно даже в том случае, если это идет за счет различия в величине импульсов при колебаниях в разных направлениях. Теперь синтетический рубин заменил прежние стальные палеты и импульсный штифт. Рубиновые палеты в анкере и импульсный камень всажены в вырезах и приклеены шеллаком. Спусковой механизм с рубиновыми камнями имеет значительно более низкие пассивные сопротивления и лишь незначительный износ рабочих поверхностей.
Рис. 19. Штифтовой спусковой механизм Роскопфа
Самым простым свободным анкерным спуском, часто применяемым в карманных часах, настольных будильниках и дешевых настенных балансовых и наручных часах, является штифтовой спусковой механизм. Самый старый вид такого механизма – это спусковой механизм Роскопфа (рис. 19), названный так по его автору, швейцарцу Георгу Фредерику Роскопфу (1813...1889), который в шестидесятых годах прошлого века применил этот спуск в дешевых карманных часах. Этот спуск сохранился до настоящего времени благодаря простоте изготовления и небольшой себестоимости.
Рассматривая более детально формы анкерных спусковых механизмов балансовых часов производства различных часовщиков, мы увидим некоторые конструктивные особенности, которые, правда, несколько изменяют геометрическую конфигурацию спуска, но не изменяют его работу. На некоторых старых часах можно видеть на футляре надпись «Ancre ligne droit». Это известный тип английского или швейцарского спускового механизма с осями баланса, анкера и спускового колеса, находящимися на одной прямой, иногда анкер имеет иную форму, обозначаемую «ancre de côté» – боковой анкерный спуск.
Различия имеются и в длине вилки анкера, и в конструкции палет. Если камневые палеты всажены в плечи анкера так, чтобы они были видимы по всей длине, эти палеты называют «levees visibles». Наоборот, камни, всаженные в вырезы, имеющиеся в плечах анкера, так, что спуск зачастую производит на первый взгляд впечатление, что его анкер имеет металлические палеты, называют «levees convertes».
До сих пор мы в отношении свободных балансовых анкерных механизмов рассматривали лишь стопорные и анкерные системы. Совершенно логично, что некоторые часовщики изыскивали такие механизмы, у которых независимо колеблющийся осциллятор приводился в движение таким спусковым механизмом, который объединял бы элементы обеих этих или еще и других систем.
К таким часовщикам относился француз Роберт Робин (1742...1800), изготовлявший часы со спусковыми механизмами, имевшими элементы анкерных и стопорных спусковых механизмов.
Экспериментами с комбинированием элементов различных спусковых механизмов занимался и А.Л. Бреге, который для одного из своих хронометров, изготовленных около 1795 г., использовал специальный и довольно сложный комбинированный спусковой механизм.
Спусковые механизмы с постоянным импульсом для крупногабаритных часов
Оглавление
Дата публикации:
7 сентября 2000 года
n-t.ru
Анкерный механизм — с русского
См. также в других словарях:
Анкерный механизм — состоит из анкерного колеса, вилки и баланса (двойного маятника), зто часть часового механизма, преобразующая энергию главной (заводной) пружины в импульсы, передаваемые балансу для поддержания строго определенного периода колебаний, что… … Словарь часов
анкерный — ая, ое. ancre m. 1. Отн. к анкеру (часов, механизма). Только четыре с полтиной дали <в ломбарде за часы> ... Дамские, говорят, и цилиндр, кабы анкерные. С. Елпатьевский Служащий. // РБ 1902 1 1 21. При английском исполнении часы анкерного… … Исторический словарь галлицизмов русского языка
АНКЕРНЫЙ — (от франц. ancre якорь). Особый ход карманных часов. Словарь иностранных слов, вошедших в состав русского языка. Чудинов А.Н., 1910. АНКЕРНЫЙ особо устроенный механизм карманных часов. Полный словарь иностранных слов, вошедших в употребление в… … Словарь иностранных слов русского языка
Спусковой механизм часов — Простейший спусковой механизм часов. Гиря или пружина вращает шестерню, и она с помощью механизма спуска толкает маятник то в одну, то в другую сторону. Спусковой механизм часов (на языке часовщиков: спуск, ход) (фр. échappement, англ. escapement … Википедия
Турбийон — механизм, компенсирующий влияние гравитации Земли на точность хода часов. Представляет собой анкерный механизм, помещенный внутрь мобильной платформы с балансом в центре, и совершающий полный оборот вокруг собственной оси за одну минуту.… … Словарь часов
Часы (прибор) — Часы, прибор для измерения текущего времени (в секундах, минутах, часах). Ч. относятся к категории «приборов времени», куда входят также хронометр, секундомер, таймер, реле времени и комбинированные приборы, например Ч. с секундомером. Для… … Большая советская энциклопедия
Часы — I Часы прибор для измерения текущего времени (в секундах, минутах, часах). Ч. относятся к категории «приборов времени», куда входят также Хронометр, Секундомер, Таймер, Реле времени и комбинированные приборы, например Ч. с секундомером.… … Большая советская энциклопедия
Устройство плёночного фотоаппарата — Основная статья: Плёночный фотоаппарат Содержание 1 Общие элементы конструкции 2 Внешние части и органы управления … Википедия
Устройство аналогового фотоаппарата — Основная статья: Плёночный фотоаппарат Содержание 1 Общие элементы конструкции 2 Внешние части и органы управления … Википедия
Фотографический затвор — Шторный затвор Затвор фотографический устройство, используемое для перекрытия светового потока, проецируемого объективом на фотоматериал (например, фотоплёнку) или фотоматрицу (в циф … Википедия
Затвор (фото) — Затвор фотографический устройство, используемое для перекрытия светового потока, проецируемого объективом на фотоматериал (например, фотоплёнку) или фотоматрицу (в цифровой фотографии). Путем открытия затвора на определенное время выдержки… … Википедия
translate.academic.ru